 gravbiz@mail.ru
gravbiz@mail.ru 


 Робот для сварки 2550
Робот для сварки 2550




Во время вычислений DeskProto показывает индикатор выполнения, чтобы поддержать вас информацией об их прогрессе.
После завершения вычислений DeskProto отобразит траектории:
красная линия - это путь, за которым следует кончик режущего инструмента. Первая и последняя точка траектории инструмента указана маленькими красными стрелками. Некоторые из траекторий инструмента могут быть нарисованы черными серыми линиями: это позиционирование движения фрезы над моделью (при свободной высоте движения), которое будет выполняться быстрее (называемый Rapid), чем режущие перемещения (с использованием скорости подачи). Также после последнего режущего перемещения в режиме быстрого доступа она поднимается до уровня “Zfree level” (уровень свободного перемещения по Z).
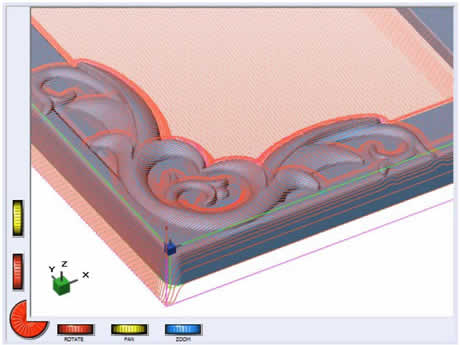
Вышепоказанное изображение было сделано после небольшого масштабирования, чтобы фактически увидеть траектории на рисунке. Вы можете четко видеть расстояние между траекториями инструмента и фактическую геометрию: это трехмерная компенсация для Cutter radius (радиуса фрезы), которую рассчитал DeskProto.






