 gravbiz@mail.ru
gravbiz@mail.ru 


 Робот для сварки 2550
Робот для сварки 2550

Робот манипулятор CRP-RH-14-10 для лазерной сварки,
MIG/MAG TIG сварки и лазерной 3D резки
Технические характеристики промышленного робота манипулятора CRP-RH14-10
- Форма руки: Вертикальный узловой шарнир
- Степень подвижности: 6 осей
- Максимальная нагрузка: 10 кг
- Точность повторного позиционирования: ±0.08 мм
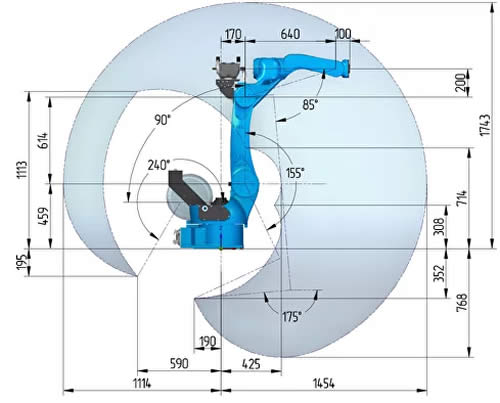
- Длина руки: 1454 мм
- Вес робота: 170 кг
- Способ крепления: к поверхности пола или потолка
- Требования к условиям Использования: Средняя температура 0-45°C Относительная влажность 20-80% (без конденсата)
- Вибрации: < 0.5 G
- Уровень IP: J1-J4: IP54 J5-J6: IP67

Робот манипулятор CRP-RH-14-10 для лазерной сварки,
MIG/MAG TIG сварки и лазерной 3D резки
Применение промышленного робота манипулятора CRP-RH-14-10
- Роботизированная лазерная сварка
- Роботизированная лазерная 3D резка
- Роботизированная MIG сварка
- Роботизированная MAG сварка
- Роботизированная TIG сварка
- Фрезерование
- Cборка
- Перемещение
- Шлифовка
- Роботизированная плазменная резка

Робот сварочный CRP-RH14-10W
оборудован сварочным полуавтоматом и податчиком проволоки

Робот сварочный CRP-RH14-10W
оборудован сварочным полуавтоматом и податчиком проволоки
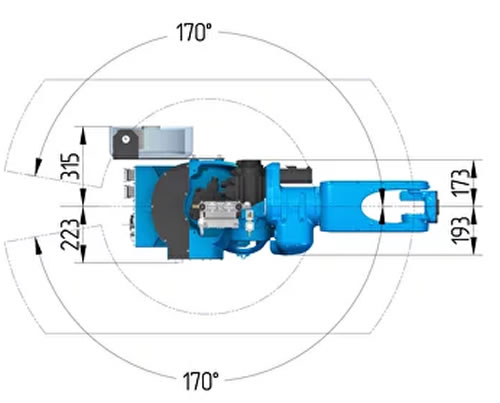
Диапазон движения робота по Осям
- Ось 1: Крепление к полу или потолку-167°~167°, настенное крепление-30°~30°
- Ось 2: -45°~175°
- Ось 3: -80°~155°
- Ось 4: -190°~190°
- Ось 5: -125°~125°
- Ось 6: -360°~360°
Максимальная скорость движения робота по Осям
- Ось 1: 169°/секунду
- Ось 2: 169°/секунду
- Ось 3: 169°/секунду
- Ось 4: 301°/секунду
- Ось 5: 222°/секунду
- Ось 6: 516°/секунду
Допустимый крутящий момент:
- Ось 4: 20 Н·м
- Ось 5: 20 Н·м
- Ось 6: 20 Н·м
Допустимый момент инерции:
- Ось 4: 0.63 кг·м²
- Ось 5: 0.63 кг·м²
- Ось 6: 0.33 кг·м²







