 gravbiz@mail.ru
gravbiz@mail.ru 


 Робот для сварки 2550
Робот для сварки 2550



Multi-Axis edition (Многоосевая редакция) DeskProto может генерировать траектории для пятиосевой обработки. Однако это довольно сложный вопрос, и он включает в себя гораздо больше, чем использование четвертой оси (описано в уроке 3).
Для пяти осевых рабочих мест DeskProto предлагает индексированную обработку: станки, с одной стороны, используют трех осевую обработку (X, Y и Z), затем вращение A и B в следующую ориентацию, снова полностью трех осевая операция и так далее. Количество ориентаций и их вращения могут быть свободно выбраны.
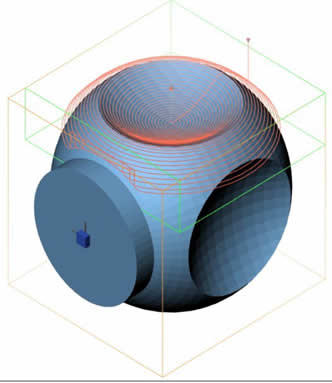
Геометрия, используемая для этого урока, представляет собой своего рода “dented sphere” (вогнутую сферу), как показано выше, вы можете найти файл DentedSphere.stl в папке образцов DeskProto.
Будет ясно, что этот урок не может быть применен пользователями редакции Entry и редакции Expert.






