 gravbiz@mail.ru
gravbiz@mail.ru 


 Робот для сварки 2550
Робот для сварки 2550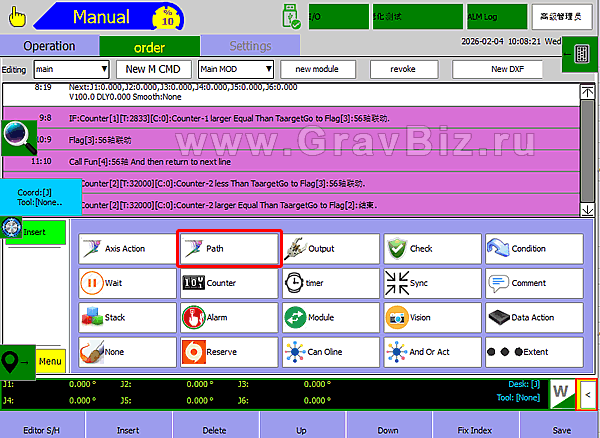
Команда Path (траектория/путь) включает в себя:
- передвижение робота по прямой линии,
- передвижение робота по дуге или кривой,
- свободную траекторию движения робота,
- передвижение робота по коружности,
- согласованное выполнение передвижений робота (относительная прямая, относительная кривая и относительная свободная траектория).
Команда привязаны к инструментам и рабочей области. Текущее положение, инструмент и рабочая область задаются при установке положения (свободное действие не предусмотрено инструментом и рабочей областью).
Положение или конечная ориентация могут отличаться (фактическое рабочее положение и ориентация не изменяются) при ручном переключении инструмента или рабочей области (относительная команда). Изменение ориентации может произойти при движении по траектории. При перемещении в единичной точке или выходе за пределы диапазона действия будет срабатывать сигнал тревоги и планирование траектории завершится ошибкой.
Note: The path command includes attitude straight line, attitude curve, free path, attitude whole circle and relative command (relative attitude straight line, relative attitude curve and relative free path);
Note: The command is attached with tools and workbench; the current position, tool and workbench are set (free action is not provided with tool and workbench) when setting the position; the position or end attitude can be different (the actual running position and attitude are not changed) when the command is manual switch of tool or workbench (relative command), attitude change may occur when path action have movement; it will give alarm and path planning will fail when moving at the singular point or exceeding the action range;





