 gravbiz@mail.ru
gravbiz@mail.ru 


 Робот для сварки 2550
Робот для сварки 2550
Настройка мягких пределов мировой системы координат
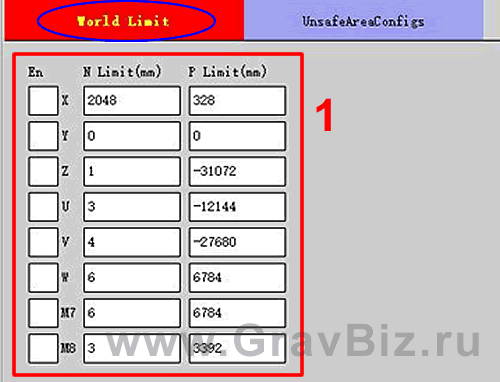
1. Установите диапазон области, в которой будетдвижение робота.
Зона движения робота манипулятора и диапазон положения конечной точки робота ограничены направлением мировых координат X, Y, Z и положением U, V, W.
Робот подаст сигнал тревоги, если выйдет за пределы диапазона.
Дополнительные оси M7 и M8 отличаются от предела узла и связаны с установленным режимом типа оси.
Отметьте Save limit «Сохранить предел»





