 gravbiz@mail.ru
gravbiz@mail.ru 


 Робот для сварки 2550
Робот для сварки 2550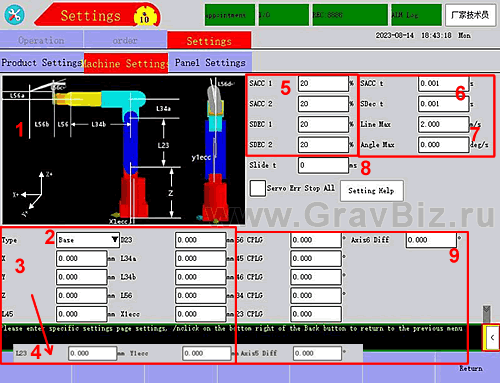
В этой вкладке нужно правильно заполните соответствующие значения параметров для вашей модели робота манипулятора. Установите систему координат, вычислите и записать значения положения от начала координат до конечного положения робота. Эти параметры относится к каждому узлу робота, пространственным перемещениям, изменениям положения, плавности ускорения и замедления.





