 gravbiz@mail.ru
gravbiz@mail.ru 


 Робот для сварки 2550
Робот для сварки 2550
Настройка связи робота делится на три типа:
- 485
- CAN
- TCP
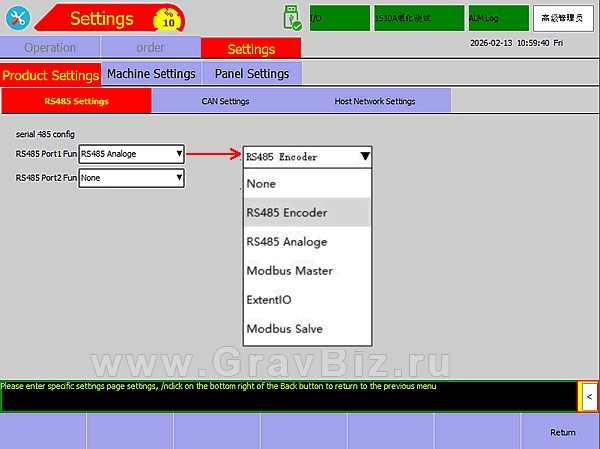
Интерфейсы CAN1 и CAN2, содержат 3 группы портов, 2 группы RS485 и 1 группу CAN, поддерживают два протокола связи. Два порта подключены к сигнальным линиям.
Поддерживаются режимы связи Modbus RTU485 и CAN.
Интерфейс монитора имеет TCP для машинного зрения и удаленного управления.





