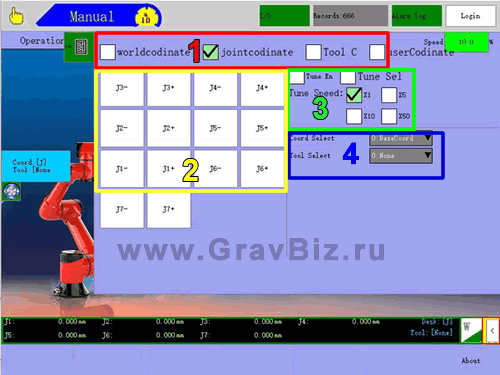
Описание рабочего экрана пульта обучения робота манипулятора
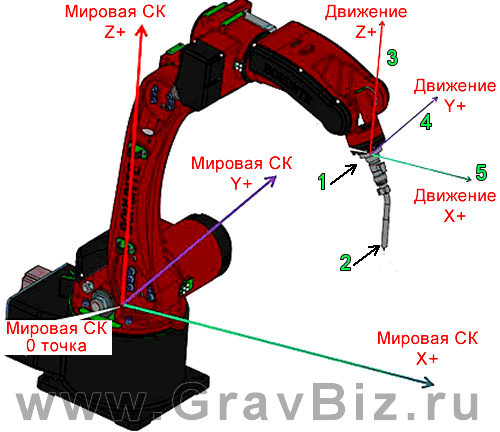
Мировая система координат промышленного робота манипулятора 6осей
|
+7 (499) 963-31-58
многоканальный |
 gravbiz@mail.ru gravbiz@mail.ru г. Москва, ул. Промышленная 11/3
|
|
 Робот для сварки 1210
Робот для сварки 1210
1225мм 6осей 10кг 155кг
 Робот для сварки 1506
Робот для сварки 1506
1600мм 6осей 6кг 166кг
 Робот для сварки 1510
Робот для сварки 1510
1500мм 6осей 10кг 150кг
 Робот для сварки 2550
Робот для сварки 2550
2550мм 6осей 50кг 725кг
Описание рабочего экрана пульта обучения робота манипулятора
Мировая система координат промышленного робота манипулятора 6осей
1 Меры предосторожности при обращении с роботом, установка
1.1 Распаковка промышленного робота
1.2 Требования к установке робота
1.3 Установка робота
1.4 Проверка и испытание робота перед отправкой
1.5 Меры предосторожности при первом использовании робота
1.6 Меры предосторожности при замене узлов робота
1.7 Гарантия безопасности
1.8 Обучение специалистов по управлению роботом
1.9 Меры предосторожности при работе с роботом
1.10 Спасение человека при агрессии робота
2 Отладка и режимы работы робота манипулятора
2.1 Внешний вид и описание пульта обучения робота
2.1.1 Кнопки пульта обучения робота слева
2.1.2 Кнопки пульта обучения робота справа
2.1.3 Верхний переключатель
2.1.3.1 Ключ переключения режимов работы
2.1.3.2 Кнопка аварийной остановки робота
2.1.3.3 Кнопка точной настройки (Клавиатура справа)
2.1.4 Кнопки пульта обучения робота внизу
2.1.5 Кнопки по бокам пульта обучения и USB разъем
2.2 Домашняя страница пульта обучения робота
2.2.1 Домашняя страница режимы работы робота
2.2.2 Авторизация при входе
2.3 Просмотр журнала
2.3.1 Страница журнала ошибок и предупреждений
2.3.2 Страница журнала операций
2.3.3 Страница записи действия кнопок
2.3.4 Управление программами
2.3.5 Мониторинг I/O ввода-вывода
3 Режим ручного управления
3.1 Работа в ручной системе координат
3.1.1 Мировая система координат
3.1.2 Пользовательская система координат
3.1.3 Система координат инструмента
3.1.3.1 Описание системы координат инструмента
3.1.4 Система координат звена
3.2 Кнопка
3.3 Сигналы выходные
.3.4 Калибровка инструмента робота
3.4.1 Калибровка инструмента робота по двум точкам
3.4.2 Калибровка инструмента робота по трем точкам
3.4.3 Калибровка инструмента робота по 6 точкам
.3.5 Программируемые кнопки
.3.6 Создание и калибровка координат рабочего стола
3.7 Калибровка дополнительных координатных осей
. 3.7.1 Калибровка робота при работе с поворотным столом 1 (7я ось) Вращение
. 3.7.2 Калибровка робота при работе с поворотным столом 2 (8я ось) - Вращение
. 3.7.3 Калибровка дополнительной координатной оси - Перемещение
3.8 Мониторинг адресов системы
3.9 Отладка
4. Режим Stop Настройки
4.1.1. Вкладка Product settings настройки робота
4.1.1.1 Целевая программа
4.1.1.2 Переключение номера формы через сигнал ввода-вывода
4.1.2. Параметры запуска робота
4.1.2.1 Динамический допуск
4.1.2.2 Время подачи звуковых сигналов
4.1.2.3 Задержка запуска подпрограммы 8
4.1.2.4 Фильтрация сигнала кромки
4.1.2.5 Система координат по умолчанию
4.1.2.6 Скорость в автоматическом режиме
4.1.2.7 Автоматическая скорость первой формы
4.1.2.8 Остановка вывода времени сброса
4.1.2.9 Сигнал X23 «Разрешить полный автоматический режим»
4.1.2.10 Ручное ограничение скорости
4.1.2.11 Повторное использование вывода ввода-вывода
4.1.2.12 Запуск с фиксированной первой строки
4.1.3 Настройка клапана при штамповке
4.1.4 Настройка ввода-вывода
.4.1.4.1 Настройки повторного использования ввода-вывода
.4.1.4.2 Режим State
.4.1.4.3 Состояние ввода-вывода IO
.4.1.4.4 Настройка выдачи ошибок
.4.1.4.5 Сигнал границы
.4.1.4.6 Обязательные сигналы ввода и вывода
.4.1.5 Кнопки и индикаторы
4.1.5.1 Функциональные кнопки F1 - F5
4.1.6 Настройка связи робота
4.1.6.1 Настройка RS485
.4.1.6.2 Настройка CAN
4.1.6.3 Настройка сети
4.1.7 Настройка зоны безопасности
4.1.7.1 Мягкие пределы рабочей зоны в мировых координатах
4.1.7.2 Настройка безопасных зон робота манипулятора
.4.1.8 Настройка процесса
4.1.8.1 Тип процесса
4.1.9 Функция резервирования
4.1.10 Общий адрес
4.2 Настройка робота манипулятора Machine Settings
4.2.1 Настройки моторов
4.2.1.1 Выбор осей
4.2.1.2 Тип энкодера
4.2.1.3 Карта соответствия сервомоторов
4.2.1.4 Тип оси
4.2.1.5 Количество импульсов на оборот
4.2.1.6 Вывод
4.2.1.7 Передаточное отношение
4.2.1.8 Положительный предел и отрицательный предел
4.2.1.9 Положительное ограничение. Отрицательное ограничение
4.2.1.10 Время ускорения / время замедления
4.2.1.11 Максимальная скорость
4.2.1.12 S ускорение 1/2, S замедление 1/2
4.2.1.13 Прямое и обратное вращение сервомотора / скорость тестирования
4.2.1.14 Установка начальной координаты.
.4.2.2 Структурные параметры
4.2.2.1 Описание параметров
4.2.2.2 Настройки ускорения, замедления и дрожание при движении
4.2.2.3 Системные настройки
4.2.2.4 Проверка исходного положения (для калибровки)
4.2.2.5 Параметры сервопривода
4.2.2.5.1 Код сервомотора
4.2.2.5.2 Направление вращения сервомотора
4.2.2.5.3 Петлевое усиление скорости
4.2.2.5.4 Интеграл контура скорости
4.2.2.5.5 Петлевое усиление позиционирования
4.2.2.5.6 Настройки демпфирования
4.2.2.5.7 Плавная фильтрация
4.2.2.5.8 Параметры сервоприводов
4.2.2.6 Техническое обслуживание
4.3 Настройка ручного контроллера
4.3.1 Настройка ручного контроллера
4.3.2 Техническое обслуживание
4.3.2.1 Обновление ПО
4.3.2.2 Создание резервной копии / восстановление
6.2.2.15 Команды данных Data Action
6.2.2.15.1 Команды управления
6.2.2.15.2 Команда начального положения
6.2.2.15.3 Непосредственное значение
6.2.2.15.4 Данные адреса
6.2.2.15.5 Данные о положении
6.2.2.15.6 Специальное примечание о выключении
6.2.2.16 Процесс
6.2.2.17 Резервирование
6.2.2.18 Команды CAN
6.2.2.19 Команда И ИЛИ
6.2.2.20 Расширения
6.2.2.20.1 Адрес начала пути
6.2.2.20.2 Сохранение позиции узла Save point
6.2.2.20.3 Аналоговый контроль
6.2.2.20.4 Настройка безопасной зоны
6.2.2.20.5 Одноосевая укладка
6.2.2.20.6 Запись положения оси
6.2.2.20.7 Переключение систем координат
6.2.2.20.8 Переключение инструментов
6.2.2.20.9 Переключение действий
6.2.2.20.10 Безопасный крутящий момент
6.2.2.20.11 Ускорение/замедление оси
6.2.2.20.12 Установка ускорения/замедления траектории движения
6.2.2.20.13 Отслеживание изделий на конвейере
6.2.2.20.14 Включение настроек
6.2.2.20.15 Настройка физической скорости
6.2.2.20.16 Настройки остановки робота
7 Датчик 6ти осевой для программирования робота
7.1 Подключение и калибровка шестиосевого датчика
8 Ошибки робота и способы устранения
8.1 Просмотр ошибок
8.2 Сброс ошибок робота
8.3 Описание ошибок и способы устранения
8.3.1 Ошибки роботов манипуляторов Borunte Err1-Err42
8.3.2 Ошибки роботов манипуляторов Borunte Err90-Err197
8.3.3 Ошибки роботов манипуляторов Borunte Err200-Err299
8.3.4 Ошибки роботов манипуляторов Borunte Err300-Err1539
10 Приложения
11 Распиновка разъемов и подключение робота манипулятора
1. Распиновка разъемов 46PIN
1.1 Обычный 6-осевой робот
2 4-осевой штамповочный станок
2 Распиновка разъемов 40PIN для тяжелых условий эксплуатации
3 Распиновка сварочного провода (для контроллера одноплатной системы)
3.1 Провод управления для системы робота BORUNTE
3.2 Распиновка связи системы и сервопривода RS485
3.3 Распиновка проводов энкодера/двигателя сервосистемы
3.3.1 Серия сервоприводов HCFA X3E
3.3.2 Серия сервоприводов INOVANCE IS620P
3.3.3 Серия сервоприводов RUKING SE A3
13 Инструкции по техническому обслуживанию робота манипулятора
14 Требования к электропитанию для подключения робота манипулятора





