Borunte Инструкция по лазерной сварке с роботом
4. Создание программ по роботизированной лазерной сварке
|
+7 (499) 963-31-58
многоканальный |
 gravbiz@mail.ru gravbiz@mail.ru г. Москва, ул. Промышленная 11/3
|
|
 Робот для сварки 1210
Робот для сварки 1210
1225мм 6осей 10кг 155кг
 Робот для сварки 1506
Робот для сварки 1506
1600мм 6осей 6кг 166кг
 Робот для сварки 1510
Робот для сварки 1510
1500мм 6осей 10кг 150кг
 Робот для сварки 2550
Робот для сварки 2550
2550мм 6осей 50кг 725кг
Borunte Инструкция по лазерной сварке с роботом
4. Создание программ по роботизированной лазерной сварке
1. Подключение лазерной сварки к роботу манипулятору
1.1 Подключение лазерного источника, аппарата лазерной сварки с RS485 к роботу манипулятору
2. Шаги настройки роботизированной лазерной сварки
2.1 Запуск процесса лазерной сварки
2.2 Настройка аналогового подключения
3. Параметры роботизированной лазерной сварки
3.1 Роботизированная лазерная сварка - настройки лазерной сварки
3.2 Роботизированная лазерная сварка - настройка мощности
3.3 Роботизированная лазерная сварка - команды
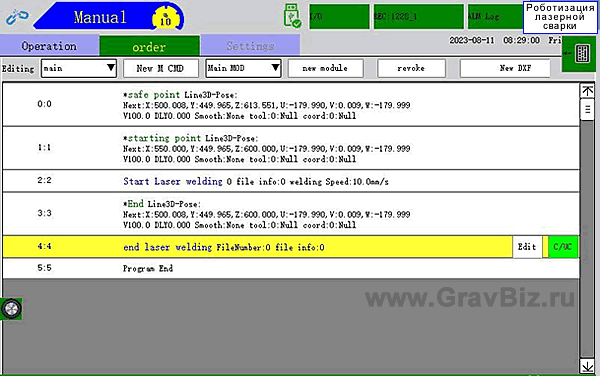
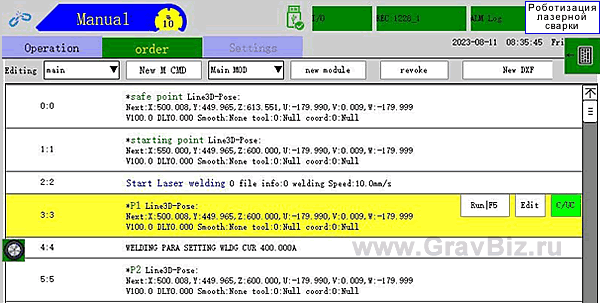
4. Создание программ по роботизированной лазерной сварке
4.1 Подготовка программы лазерной сварки
4.2 Изменения мощности после перехода





