 gravbiz@mail.ru
gravbiz@mail.ru 


 Робот для сварки 2550
Робот для сварки 2550



Системы координат промышленных роботов или система координатных перемещений, промышленного робота определяет кинематику основных движений и форму рабочей зоны (зоны обслуживания манипулятора).
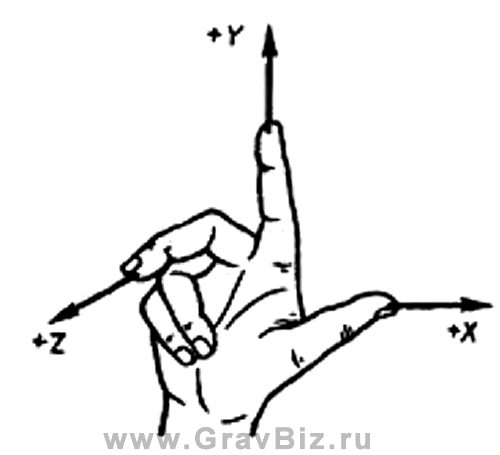
Системы координат промышленных роботов должны соответствовать правилу правой руки (рисунок 1).
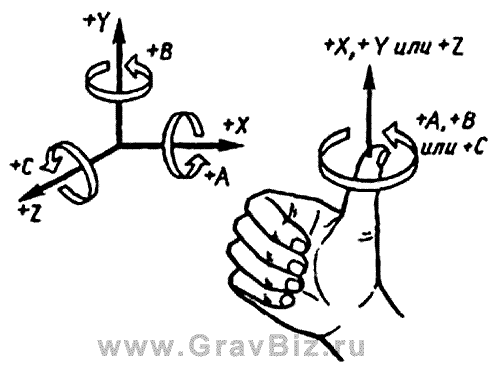
Буквами А, В и С следует обозначать вращательные движения вокруг осей, параллельных соответственно осям координат X, Y и Z. Положительные направления А, В и С должны совпадать с направлением вращения винтов с правой резьбой при их завинчивании в положительных направлениях осей X, Y и Z соответственно (рисунок 2).
Устанавливаются следующие системы координат:
- мировая;
- система координат основания;
- система координат механического интерфейса.
Каждая из систем координат определяется плоскостью XY, например оси Х1 и Y1 системы координат основания лежат в установочной плоскости основания. Ось координат Z перпендикулярна плоскости XY.
Источник: ГОСТ 30097-93 Роботы промышленные Системы координат и направления движений







